Practice – December 30
Nick and Eric worked on attaching the collection basket to the vertical arm. Jordan and Carter worked on attaching the license plates to the robot.[…]

11/25/2024 Practice
Gavin continued to assemble smaller vertical arm. Michael fixed servos and code for brush and horizontal lift. Eric, Nick, Carter and Kyle organized the room[…]

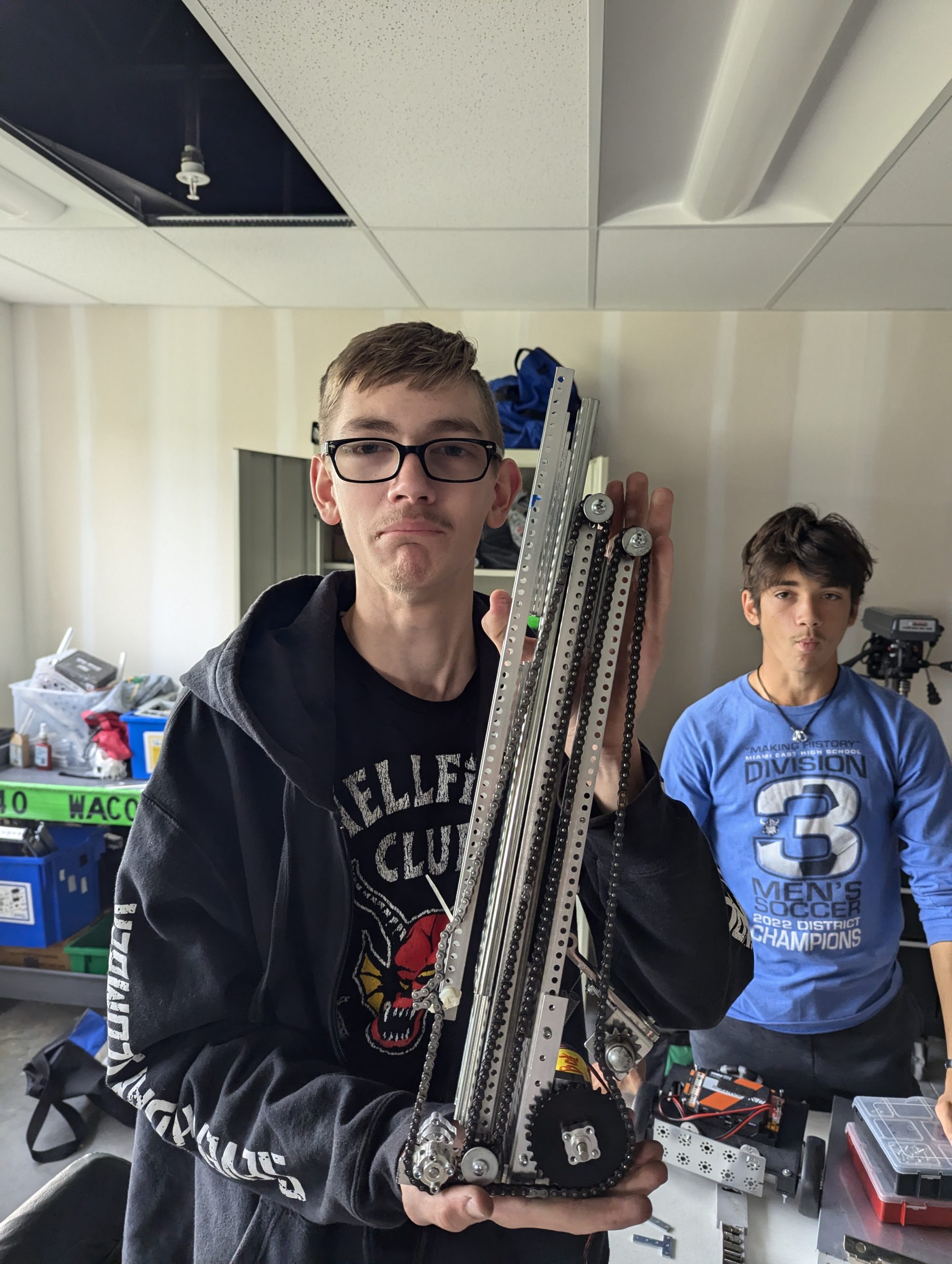
Practice – November 23
Preston worked on making the vertical arm thinner. Jordan mounted the control hub and batteries to the robot. Gavin tapped screw holes in the vertical[…]
November 18
• Gavin worked on the assembly of the vertical arm. • Nick worked on the horizontal grabber hand. • Michael and Eric worked on mounting[…]
Practice – November 16
Preston made some CAD modifications to a planned specimen grabber. Jordan and Gavin disassembled the vertical arm and prepared the robot for a new arm[…]

Practice – November 11
Gavin worked on better integrating the arm into the robot. Nick and Eric worked on the horizontal arm/grabber. Carter looked into a bracket for a[…]
Practice – November 4th
Preston finished the revised furniture budget Michael, Jordan, and Carter dissassembled the old base. Eric and Nick finished the horizontal arm. Gavin attached the vertical[…]

Practice – October 28 Halloween Practice!
Preston Worked on the Aerobotics Furniture Budget Michael got roadrunner installed and ready to start and worked on a servo-powered claw. Worked on Vertical Claw.[…]
Practice – October 26
Preston worked on reducing the total cost of the Aerobotics Furniture Budget. Michael worked on implementing roadrunner as well as tested a lift arm. Nick[…]
Practice – October 21
Preston worked on improving the model for the first grabber prototype. Michael and Jordan worked on fixing the gearboxes on the robot base. Gavin worked[…]
Practice – October 14th 120e6754f89180088400fbd98916510b
Eric Worked on modeling the Vertical Arm Nick and Jordan worked on building a new robot base. Kyle and Carter worked on sorting components and[…]
Practice – 10/12/2024
Builders (Jordan, Nick) got the first working arm lift working. Few issues with metal hitting metal. Programmer Michael got initial Roadrunner working with the tuning[…]
Practice – October 7th
Michael made progress implementing RoadRunner into the robot. Gavin and Eric worked on CAD modeling the robot arms. Jordan and Kyle worked on a chain[…]

MOVING DAY!!!! – September 23
We moved into the new building! We brought in all of our stuff and set up the field. In addition, Eric worked on the wheels[…]

Sept 16, 2024 – Practice
The field has arrived and Gavin, Nick, Eric, Michael, Kyle and Jordan began assembling the Submersible and point basket. Preparations being made for Saturday’s WACOs[…]
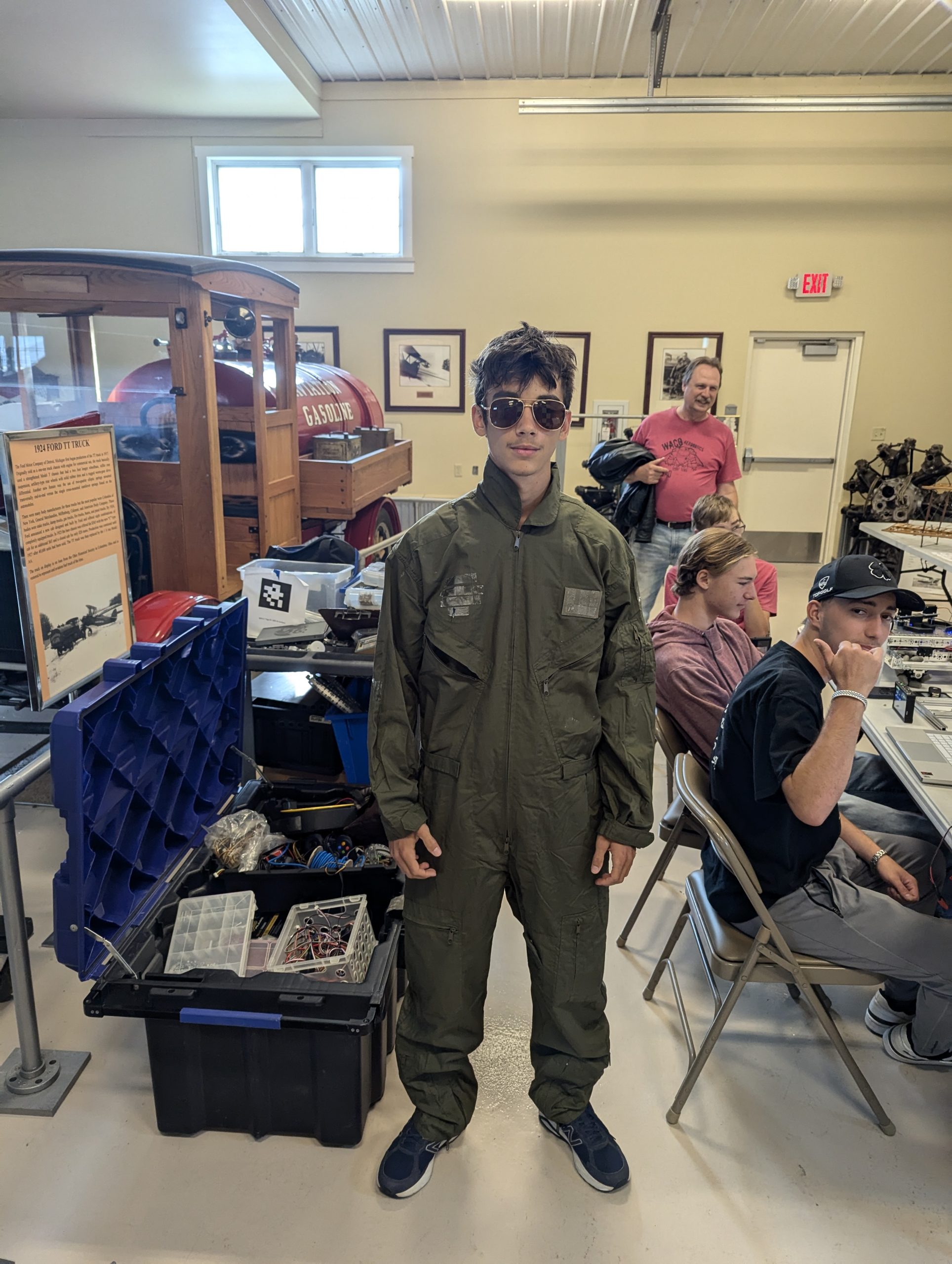
Sept 7, 2024 – Practice and Kickoff
Coders continued work on the acceleration/deceleration gain. Tried on jumpsuits for competition uniforms. Attended the 2024-2025 Into the Deep kickoff at Dayton STEM Academy.
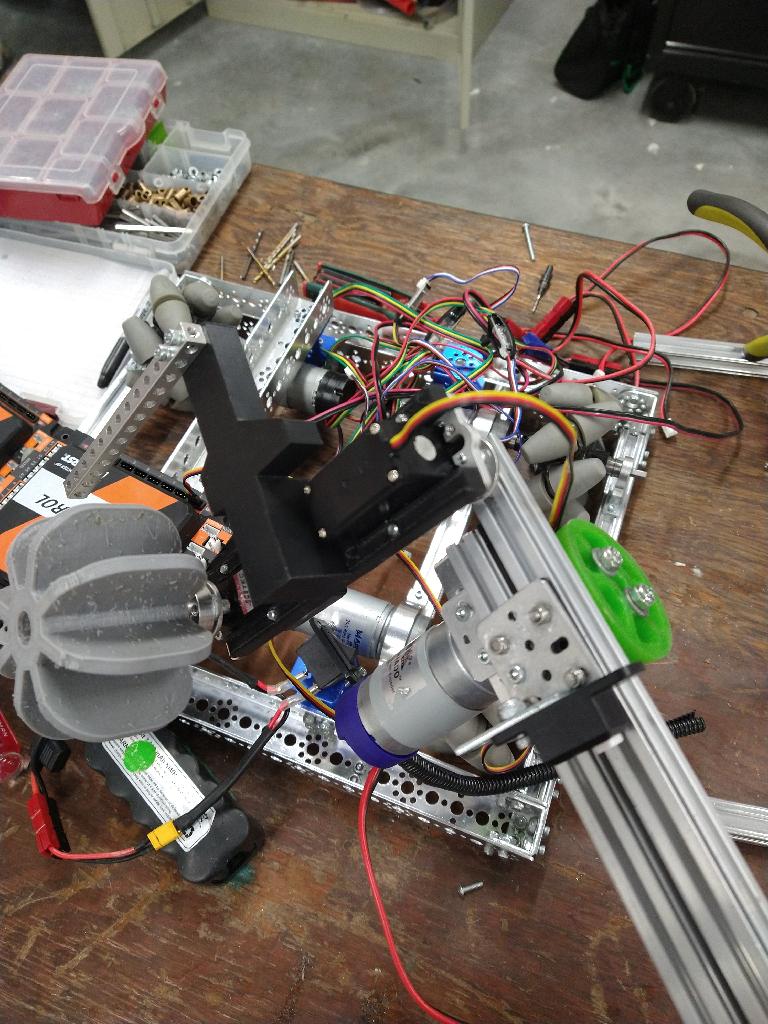
Practice – September 2
Gavin worked on acceleration control for the robot. Joprdan and Eric worked on the extender arm. Preston worked on a budget for this year, as[…]