Practice – September 30
Preston worked on some logistical planning and began putting together a layout and budget for our workspace’s furniture. Gavin worked on 3D modeling the collector[…]

Aug 31 Practice
Coders got a linear acceleration and deceleration algorithm working for the robot to prevent the sudden starts (jumping) and stops. Gavin worked on a parabolic[…]
Practice – August 26
Preston held a meeting detailing some of the upcoming events later in the month. Michael and Gavin continued work on acceleration control in the coding[…]
8/12/24 Practice
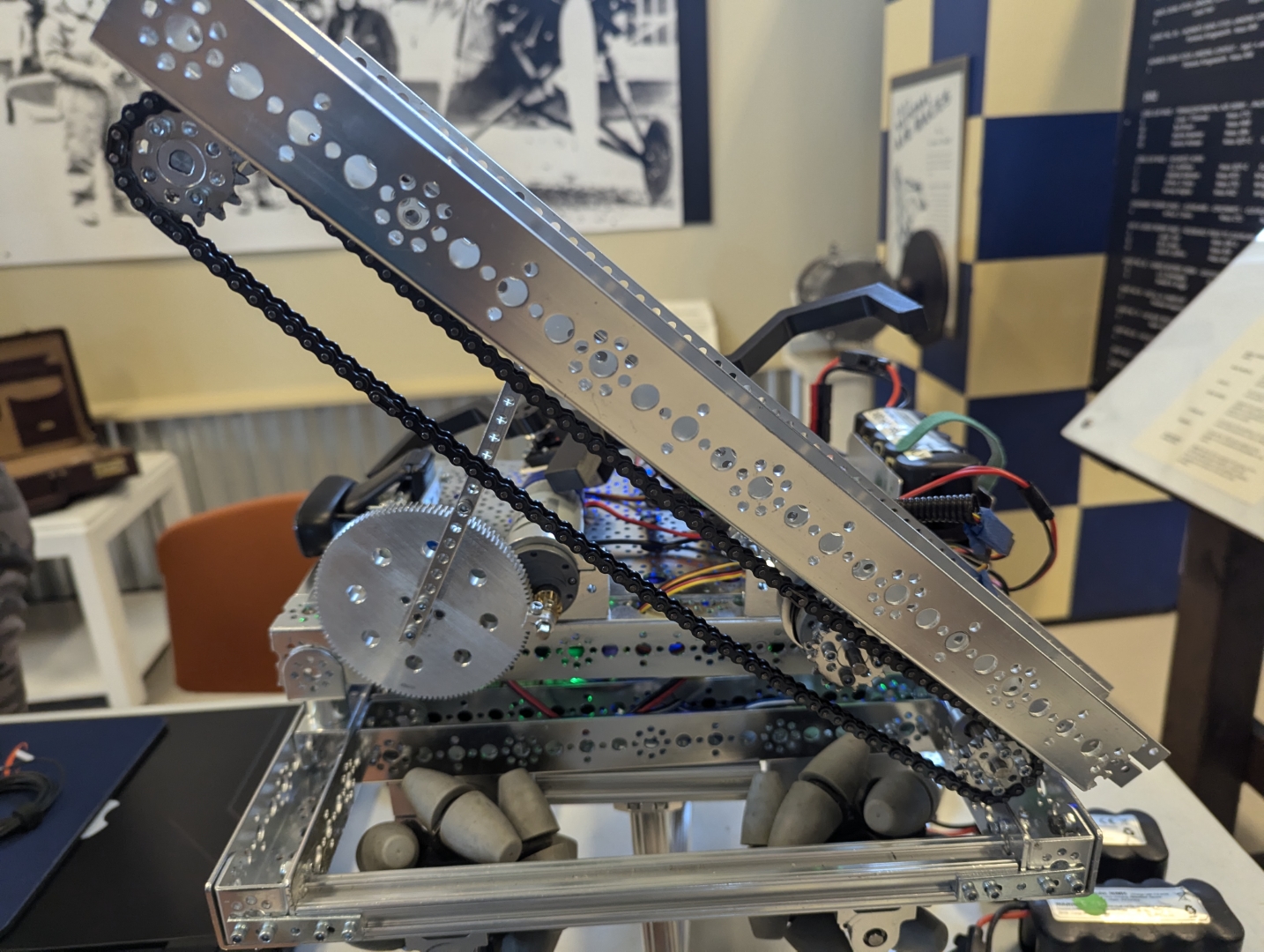
Programers Updated code. Don’t forget to include the gearbox multiplyer. Builders Fixed chain drive on arm.
Practice – August 3rd
Preston learned how to model smaller sprockets for a chain drive using Onshape. Jordan continued work on the robot arm and suggested the idea of[…]
Practice June 29, 2024
Continued to create new autonomous test mode. Previous autonomous drive code was overwritten and must be recreated.
Practice – July 27
Gavin worked on coding distance driving for Autonomous. Eric worked on the extension mechanism for our experimental lifter arm. Preston researched newer components as well[…]
June 24, 2024-Practice
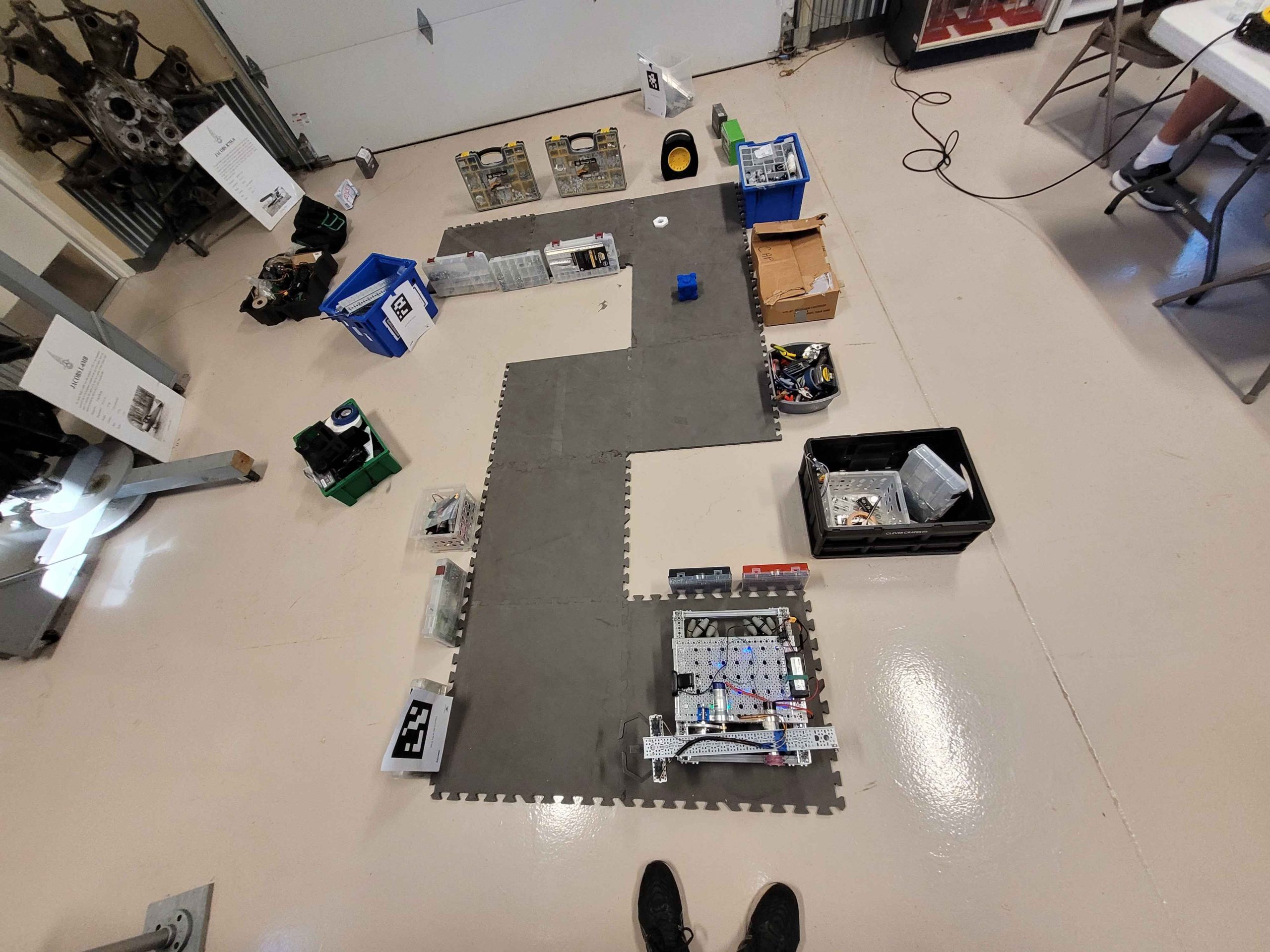
Eric and Jordan built practice obstacle course to help train autonomous drive. Documented course on graph paper to recreate Layout of practice autonomous course Gavin[…]
Practice – June 17
💡 Preston finished “coding” the MiniBot (Stephen did most of the work). 💡 Gavin, Michael, and Eric found a bad wire on the robot.
Practice – July 15, 2024
Limited practice with just Jordan. Worked on upgrading the claw arm from a string and pully to a chain mechanism.
Practice – June 10
Gavin and Michael attended practice tonight. Laptops were being used by the Lego team, so limited programming available. Troubleshooting issues with receiving encoder values on[…]
Practice – June 1st
Gavin and Michael worked on coding the arm and making it run at ludicrous speeds. Preston, Nick, and Eric got a crash course on coding[…]
Practice 5/25/2024
💡 Gavin worked on the coding the camera for the robot 💡 Jordan and Nick worked (unsuccessfully) on installing a latch for the hinging components[…]


April 6th
Programmer and Build Teams hard at work! Programmers logged into the new robot and successfully created a working teleOP mode. Using drone controls to more[…]

April 29 Practice
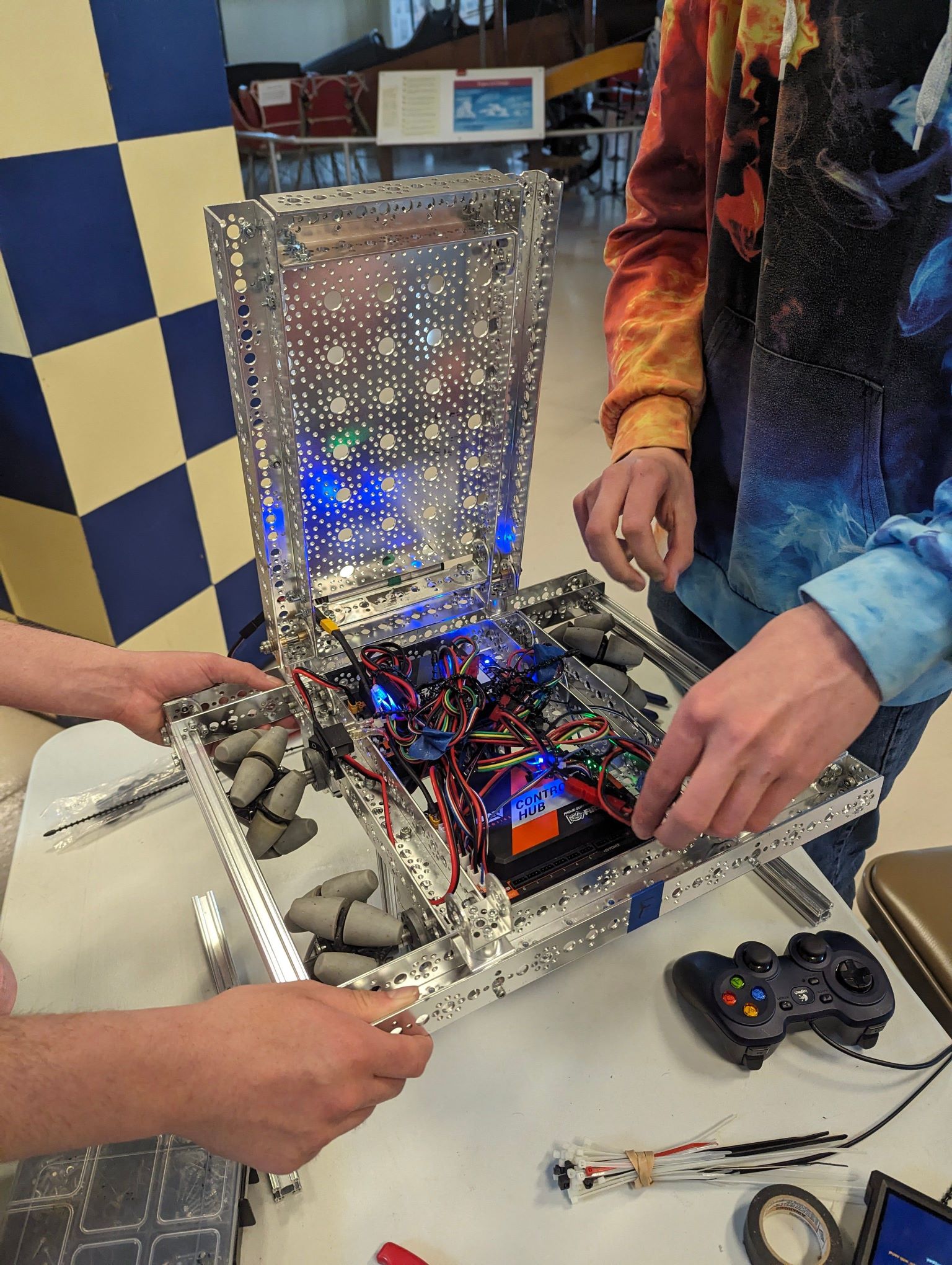
Confirmed that encoder wires and motors are still functioning properly. Added a flip-up platform above the Command and Control modules and wiring to easily reach[…]

March 30th (practice)
Programmers We Began setting up and define a way for our robot to automatically calculate the conversation between degrees and CPR (Counts Per Rotation). This[…]