
Practice 3/6/26-3/7/26
Attendance: 3/6/26-Preston,Nick, Gavin, Jude, and Greyson – 3/7/26 Preston, Nick, Gavin, Jude, Jordan, Greyson, and Asher There is a lot going on in this next[…]
Practice 2/27/26
Time: Friday, 6:00pm. – 9:00pm. Attendance: Nick, Gavin, Jude, Preston, Eric, Asher, and Greyson The team is currently getting close to the final phases of[…]
Practice 2/20/26-2/21/26
Time: 6:00pm-9:00pm Attendance 2/20/26: Nick, Gavin, Preston, Greyson, Jude, Jordan, and Asher We are currently 7 practices away from state. Here is where we stand:[…]
Practice 2/6/26 -2/7/26
Attendance: Gavin, Preston, Nick, Jordan, Eric, Jude, Greyson, and Asher Coaches: Mr. Barth, Mr. Duff, and Mr. Bodey Overview 2/6/26: For the first half of[…]
Practice: 2/2/2026
Attendance: Preston, Nick, Grayson, Gavin, Asher, Eric, Jude Coaches: Dave, Marcus Coding: Gavin wrote a test script to run the prototype revolverless mechanism. Mechanical: Preston[…]
Practice 1/30-1/31/26
Attendance: Gavin, Preston, Nick, Jordan, Eric, Jude, Greyson Coaches: Mr. Duff, Mr. Bodey, and Dave As an overview, the next competition is State Championships. It[…]
Practice 1/19/26
Attendance: Gavin, Preston, Eric, Asher, Nick, Greyson, Maddox, Jude, and Jordan Coaches: Dave, Mr. Duff, Mr. Bodey Coders: Fixed some problems with the autonomous codes.[…]
After Hours Coding
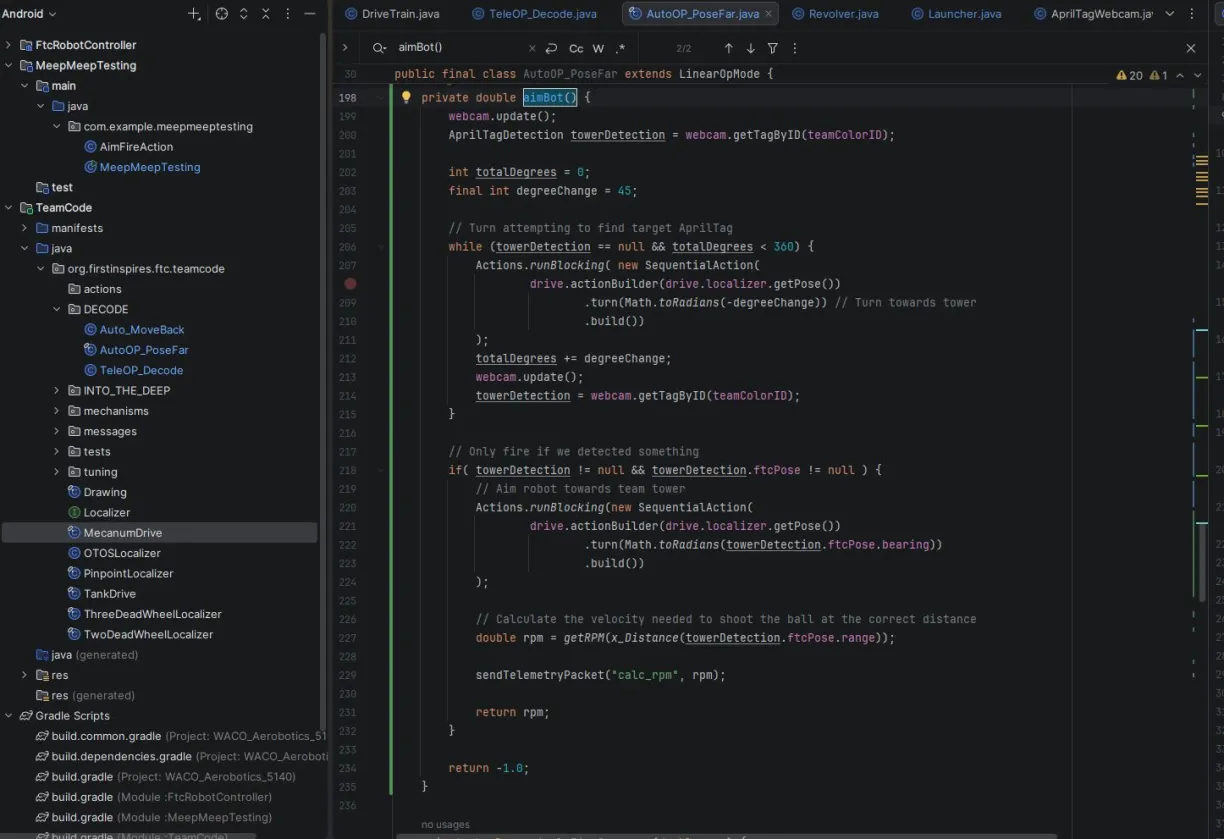
Coders have been hard at work in between practices getting autonomous working and ironing out bugs in the mechanisms. Trajectory simulation using MeepMeep laid out[…]

Practice 1/12/2026
Time: 6:00pm-9:00pm Attendance: Gavin, Preston, Jordan, Eric, Nick, Asher, Jude, Greyson, Maddox, and Pellum. Coaches: Marcus, Dave, Stephen To-Do List: Coaches wisdom: Make sure we are here for[…]
Practice 1/5/2025
Time: 6:00pm-9:00pm Attendance: Gavin, Preston, Jordan, Eric, Nick, Asher, Jude, Greyson, and Maddox Coaches: Mr. Duff Coders: Continued to optimize the code to use less[…]

Jan. 3, 2026 – Practice
Attendees: Jordan, Eric, Preston, Gavin, Jude, Asher, Maddix, Kemper, Pellum Asher, Eric, Preston, Jordan, Maddix, Jude, Kemper, Pellum got the mechanical systems integrated and wrapped[…]

Jan 2, 2025 – Practice
Attendees: Jordan, Preston, Eric, Gavin, Jude, Asher Thanks to our generous sponsors for the new storage bins. Our old large bin was breaking into pieces[…]
Practice 12/30/26
Time: 9:00pm-12:00pm Attendance: Gavin, Preston, Jordan, Nick, and Maddox Coaches: Mr. Duff Overview: The goal today was to get all mechanical things down. This will[…]

Dec. 27, 2025 – Practice
Gavin, Preston, Asher, Jude, Eric Continued the mad dash to assemble the updated sweeper, revolver and launcher. Old pieces have been removed and new components[…]

Dec. 26, 2025 – Practice
Team: Gavin, Preston, Asher Coaches: Stephen, Marcus Gavin continued coding the shooter wheels to use velocity. Issues with setting an actual velocity, but the encoders[…]
Practice 12/22/2025
Attendance: Nick, Gavin, Preston, Asher, and Eric Coaches: Mr. Duff and Mr. Bodey Build team Revolver: The revolver team modeled the revolver to be run[…]
12/15/2025 – Post Competition Debrief/Practice
Time: 6:00pm-9:00pm Attedance: Asher, Nick, Jordan, Eric, Gavin, Maddox, Greyson, Jude, and Preston Coaches: Dave, Mr. Bodey, and Mr. Duff At the start of practice[…]
Practice 12/8/25
Attendance: Eric, Jordan, Nick, Preston, Maddix, Jude, and Greyson Coaches: Dave Greyson and Maddix attached the new ramp printed gavin. Realigned the motor for the[…]
Practice 11/22/25
Attendance: Gavin, Preston, Eric, Jude, Maddix, Asher, Nick, and Jordan Coaches: Dave, Mr. Duff, and Mr. Bodey. General Summary: The revolver team and launcher team[…]
Practice 11/21/25
Attendance: Gavin, Jude, Preston, Jordan, Nick, Eric, and Asher. Coaches: Dave, and Mr. Duff General overview: The sweeper team is switching to a belt drive[…]