Practice 7/19/25
Time: Sat. 9:00-12:00 Members: Gavin, Tanner, and Nick Coaches: Dave Today was a productive practice with many things getting down that prepare for the session[…]
Practice – January 27th
The team worked on strengthening the robot’s chassis and motors. Attendence: Preston, Nick, Jordan, Kyle, Carter, Stephen, Gavin Finished strengthening horizontal arm and reinforcing Both[…]
Practice – January 20th
We drove the robot and looked at problems that were occurring. We fixed them by switching to a pulley system for the horizontal arm. After[…]
Practice – December 28
Jordan worked on the basket to lift specimens. Eric worked on stabilizing the horizontal arm. Gavin added mechanical stops to the horizontal arm and worked[…]
Practice – December 26
Nick and Eric worked on attaching the Horizontal Arm to the robot. Preston worked on a bracket to stabilize a component of the vertical arm,[…]
Practice – December 23rd
Gavin worked on troubleshooting issues with the vertical arm. Eric worked on fixing the horizontal arm and getting it ready for installation. Nick and Jordan[…]

Practice – November 23
Preston worked on making the vertical arm thinner. Jordan mounted the control hub and batteries to the robot. Gavin tapped screw holes in the vertical[…]

Practice – November 11
Gavin worked on better integrating the arm into the robot. Nick and Eric worked on the horizontal arm/grabber. Carter looked into a bracket for a[…]
Practice – November 4th
Preston finished the revised furniture budget Michael, Jordan, and Carter dissassembled the old base. Eric and Nick finished the horizontal arm. Gavin attached the vertical[…]
Practice – October 26
Preston worked on reducing the total cost of the Aerobotics Furniture Budget. Michael worked on implementing roadrunner as well as tested a lift arm. Nick[…]
Practice – October 14th 120e6754f89180088400fbd98916510b
Eric Worked on modeling the Vertical Arm Nick and Jordan worked on building a new robot base. Kyle and Carter worked on sorting components and[…]
Practice – September 2
Gavin worked on acceleration control for the robot. Joprdan and Eric worked on the extender arm. Preston worked on a budget for this year, as[…]
Practice – July 27
Gavin worked on coding distance driving for Autonomous. Eric worked on the extension mechanism for our experimental lifter arm. Preston researched newer components as well[…]
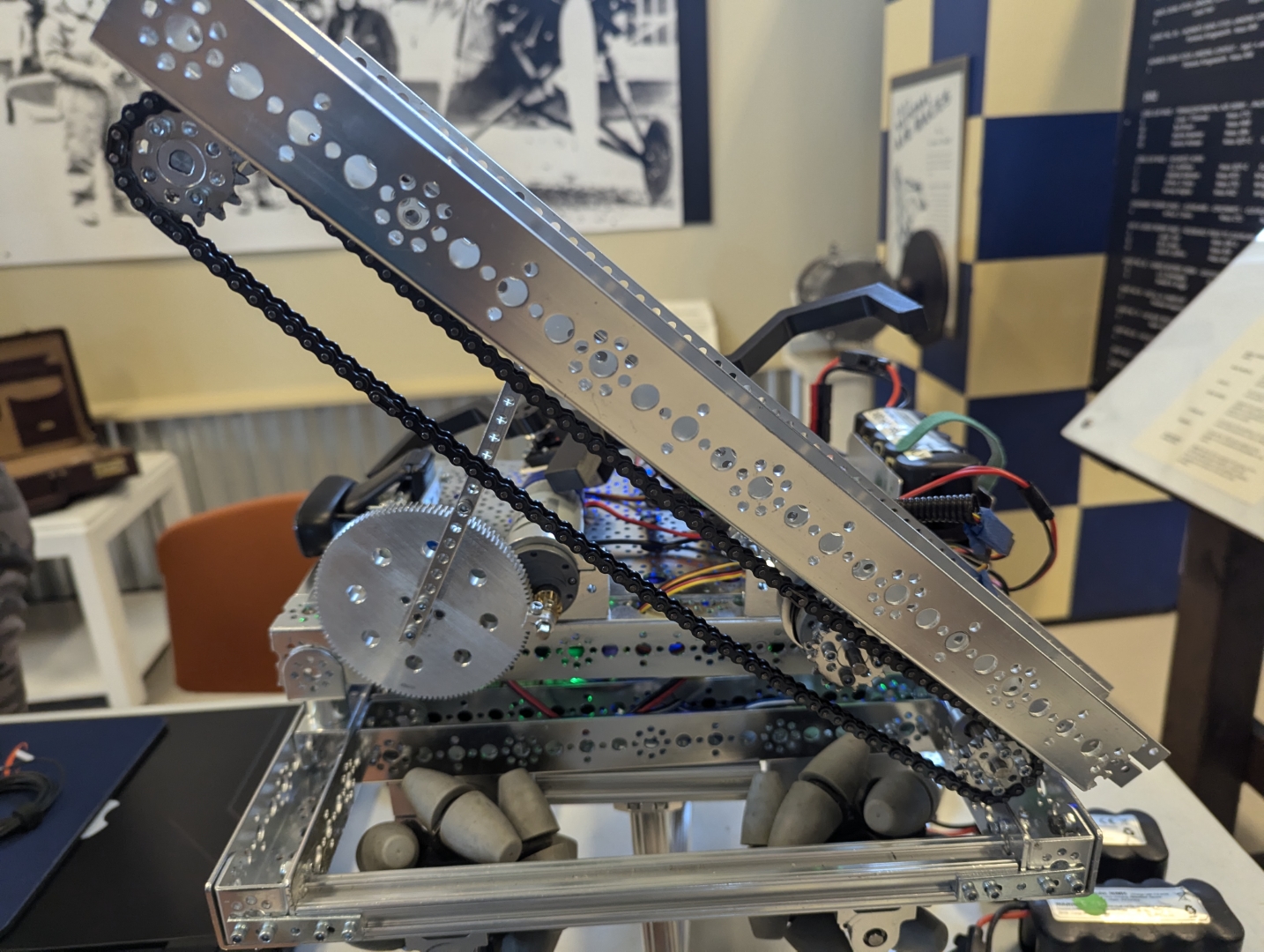
Practice – July 15, 2024
Limited practice with just Jordan. Worked on upgrading the claw arm from a string and pully to a chain mechanism.
Practice March 4th
Programming Fixed program to correctly use encoders and made a function that adds an acceleration to the beginning of the drive forwards. To slowly start[…]